« 該開始寫些機器人了吧!? | 回到主頁面 | 機器人自我穩定平衡學習研究(1) »
May 04, 2005
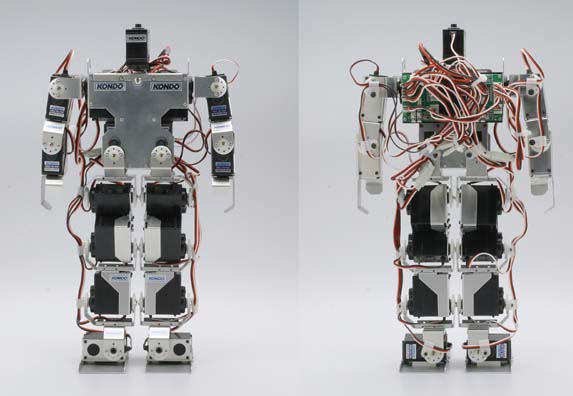
Knodo Robot KHR-1
官方網站:
http://www.kondo-robot.com/
KHR-1是日本Kondo公司推出的DIY人形機器人,
它的原型機曾贏得第五屆RoboOne比賽的獎項。
KHR-1有17個自由度,多自由度的原因是要模擬人類。
(頭1,手臂3x2,腳部5x2)
它的控制器RCB-1控制17個伺服馬達,並且可和個人電腦連線,可執行重複動作或自主動作的功能。將機器人各個關節移動到想要的動作位置,就可以透過電腦將這個位置記下,然後機器人會重複這個動作位置,藉此可以教導機器人做某些動作。
尺寸:340*180mm
重量:1.2Kg
動力來源:伺服馬達
處理單元:RCB-1
制動器:伺服馬達
感測器:無
整體自由度:17
只有控制器,而沒有處理器,這是第一步要克服的問題。
初期的研究將以電腦為運算核心,考慮其移動性應該添購無線通訊系統。
Knodo也發表了一款無線的連接PC的組件,應該同時購入,減低系統複雜度和相容性問題。

第二步就是感測器問題
沒有了感測器就永遠沒辦法成為智慧型機器人,只能是遙控機器人。
最終的目標是為他裝上視覺系統,但是初步的目標為加上加速度計。
CI Lab.已經能支援加速度計的電路設計和訊號擷取及分析,
於機器人重心位置架設一三軸加速度計;記錄其移動軌跡,及重心變化。
本來要在關節處加上加速度計來記錄所需之物理資訊,
但是從機器人本身的伺服馬達所讀到的資訊就可以了,就不需要再加裝。
接下來就是重新評估演算法......
由 tabo 發表於 May 4, 2005 12:10 PM
迴響
大寶加油..做一個機器人出來吧...
Posted by: 承 發表於 May 4, 2005 12:59 PM
沒問題...
雙足交給我,四足的就交給你啦!
Posted by: 大寶 發表於 May 4, 2005 02:36 PM
哈哈!經費已經有著落了
準備來迎接他的到來吧
Posted by: 大寶 發表於 May 5, 2005 04:45 PM
該說什麼咧??
ㄏ~~~
人生有夢~築夢踏實~~
媽呀~~我真有學問~~
總該留些活潑一點的話
不然~~會感受到你的年齡ㄟ
Posted by: 最熟悉的陌生人 發表於 July 21, 2005 02:14 PM
the robot is interesting.
would u pls tell me where to buy it?
how much.
thanks
Posted by: hiro 發表於 December 18, 2005 07:26 PM
大寶你好阿
我最近也在玩khr1
發覺KHR1在 CHI1和CH2 CH7和CH8
之間的縫隙超大 而且很容易在幾次快速運轉後
就發會有搖晃的的狀況
而且勒.....
KONDO也很聰明 似乎都已經想到會有這種問題
出了很多KHR1用的補強零件
像是我說的縫隙也有補強零件 裝了之後果然有差
馬達的不穩定減少了很多
有空我們互相交流吧
Posted by: AKITO 發表於 November 29, 2006 09:34 PM