« Kondo KHR-1 開箱全記錄 | 回到主頁面 | 杏仁瓦片GO!GO!GO! »
August 12, 2005
KHR-1 Kondo 雙足機器人 組裝記錄
花了幾天的時間總算將Kondo組裝起來了
但是還是沒有時間作設定...
很仔細的為整個組裝過程作了記錄
這邊整理一些組裝Kondo雙足機器人的部分記錄吧
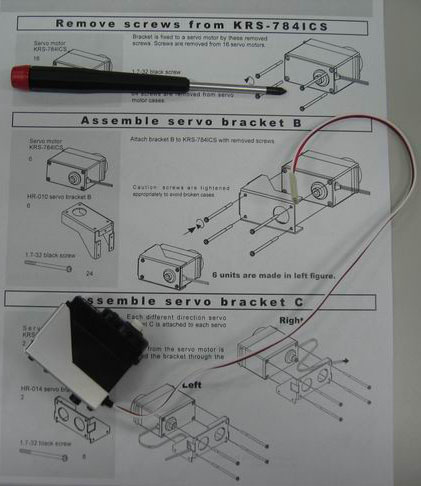
第一步要將所有的馬達先拆開,替馬達加上堅硬的組件,以防止損傷

拆開的KRS-786ICS 伺服馬達,動作角度最大180度,
扭力 : 8.7 Kg-cm(電壓 6.0V) ; 速度 : 0.17sec/60°
重量 : 45g
尺寸 : 41 x 35 x 21cm

裝上brack的馬達
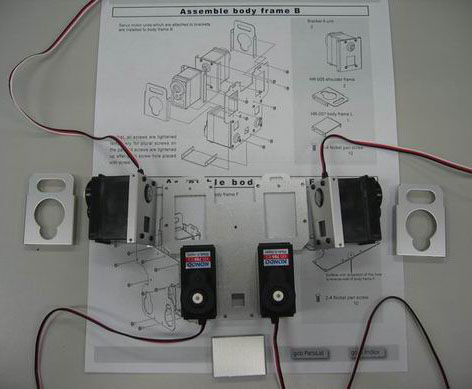
組裝Kondo雙足機器人的身體
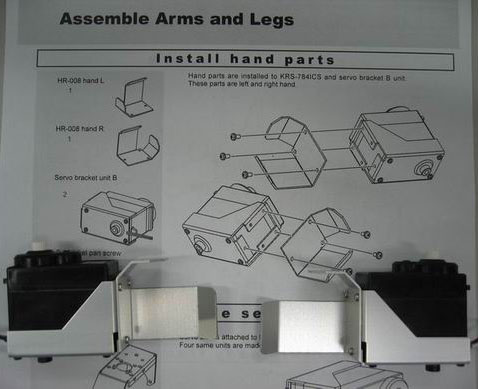
組裝Kondo雙足機器人的手部,還有手部加強版的套件,不過還不便宜呢,可以多增加一個自由度。
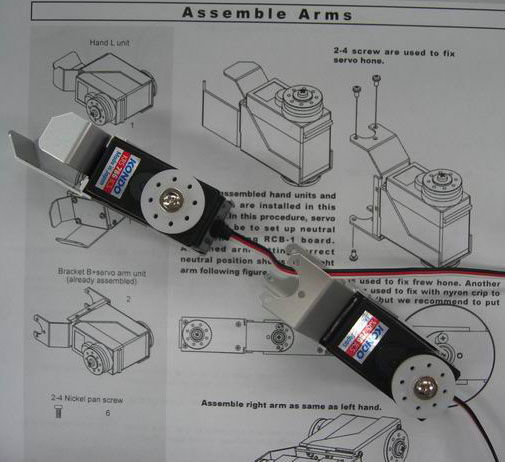
組裝Kondo雙足機器人的手臂
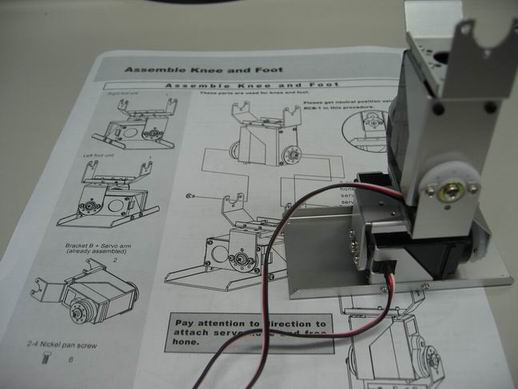
組裝Kondo雙足機器人的腳部和膝蓋
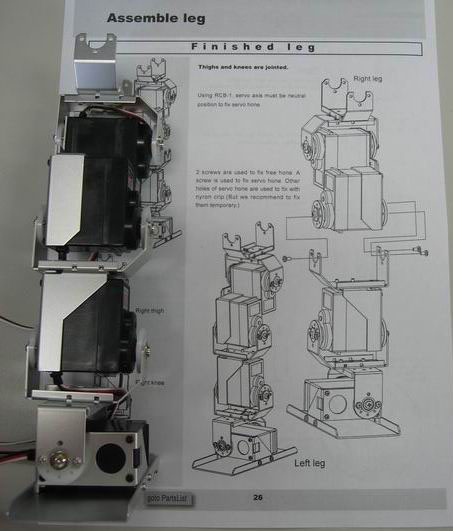
組裝Kondo雙足機器人的左腿和右腿
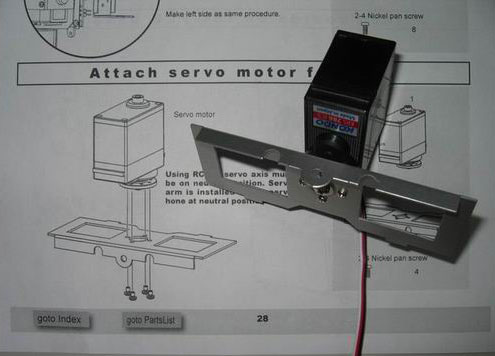
組裝Kondo雙足機器人的最後一顆馬達,頭部。
頭部為可活動的,因為電池是由此裝卸的。
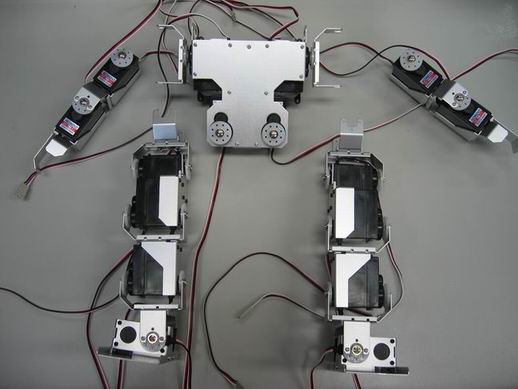
Konod雙足機器人的身體,雙手,和雙腳。
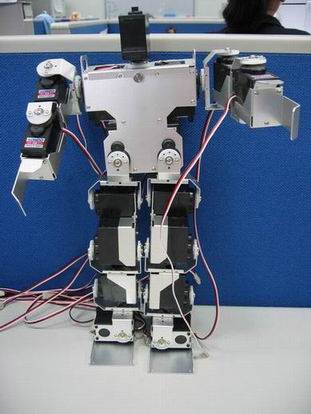
Kondo雙足機器人完成體
不過馬達都還沒設定,所以還不會動。馬達設定完成之後就可以開始好好的作囉。
由 tabo 發表於 August 12, 2005 01:15 PM
迴響
喔~~~好棒ㄚ
期待Kondo寶寶的誕生^^
Posted by: Jester 發表於 August 12, 2005 07:49 PM
哈哈!
我們家Kondo終於會走路囉
因為組裝完畢之後,好像還需要微調。
不然好像初始位置就有點問題
雖然搖搖晃晃的
但總算踏出第一步囉
等到有了好的成果再來報告吧!
下一步除了微調之外,就是建立起自己的控制介面囉
Posted by: Tabo 發表於 August 18, 2005 12:31 PM
您好! 我是台灣留日的研究生 最近開始要在日本工作
我對機器人的研究也很有興趣 之前也在日本買一個KHR-1來玩
我現在已經把KHR-1改裝成遙控探測的機器人
其實就只是在它上面裝個針孔攝影機並用遙控器來控制而已啦!
希望將來它能夠具有畫面辨識的功能 這是我的夢想囉
難得在台灣遇到同好想冒昧跟你交個朋友並互相切磋討論
因為自己一個人研究遇到問題或有新發現而無人分享會覺得孤單
另外如果你有朋友也想買一個來研究或是你想加買套件
我可以從日本當地幫忙代買並寄回台灣 應該會更快更便宜吧!
詳情請參考我的網路拍賣
http://tw.f2.page.bid.yahoo.com/tw/auction/b21513214?aucview=search
不好意思在此打擾 請您見諒並多多指教!
(不曉得要怎麼換行 預覽的時候排版都連在一起了)
Posted by: 東京工業大學研究生 發表於 September 1, 2005 09:02 AM
很高興可以看到你的文章
我是個半導體設備工程師
希望有機會可以跟你請教Kondo的相關問題
不知道怎跟你連絡
我的聯絡方式 ***
Posted by: ALAN 發表於 May 11, 2007 11:27 AM