August 12, 2005
KHR-1 Kondo 雙足機器人 組裝記錄
花了幾天的時間總算將Kondo組裝起來了
但是還是沒有時間作設定...
很仔細的為整個組裝過程作了記錄
這邊整理一些組裝Kondo雙足機器人的部分記錄吧
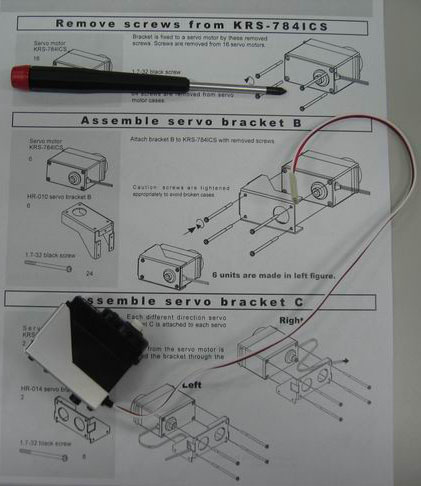
第一步要將所有的馬達先拆開,替馬達加上堅硬的組件,以防止損傷

拆開的KRS-786ICS 伺服馬達,動作角度最大180度,
扭力 : 8.7 Kg-cm(電壓 6.0V) ; 速度 : 0.17sec/60°
重量 : 45g
尺寸 : 41 x 35 x 21cm

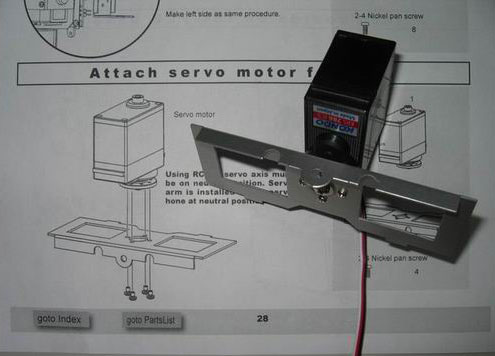
裝上brack的馬達
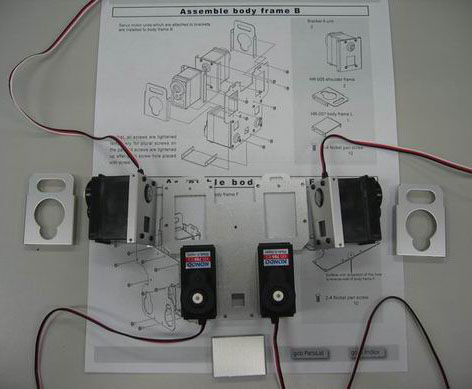
組裝Kondo雙足機器人的身體
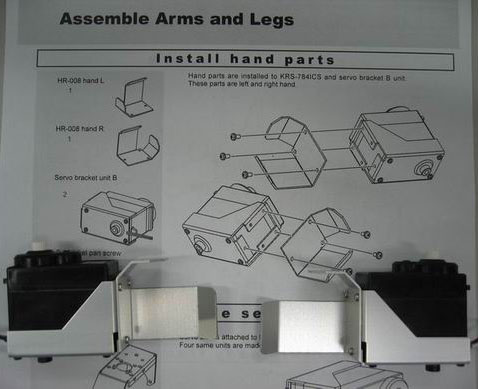
組裝Kondo雙足機器人的手部,還有手部加強版的套件,不過還不便宜呢,可以多增加一個自由度。
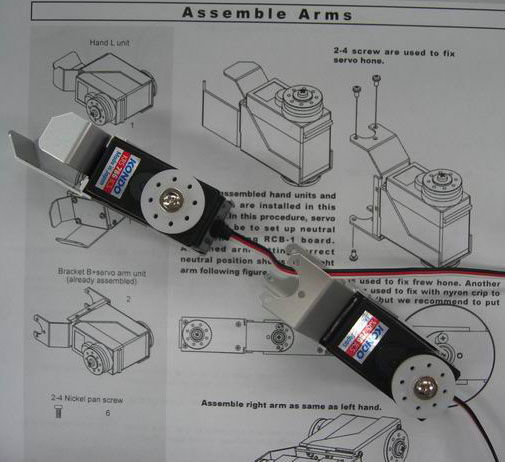
組裝Kondo雙足機器人的手臂
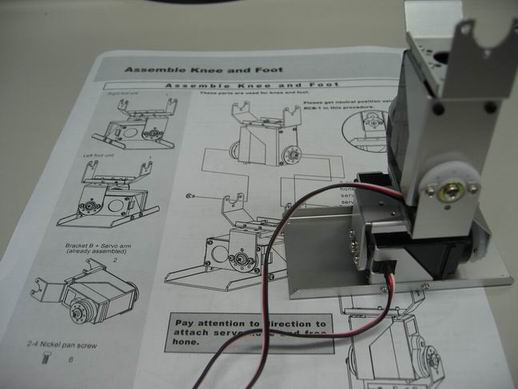
組裝Kondo雙足機器人的腳部和膝蓋
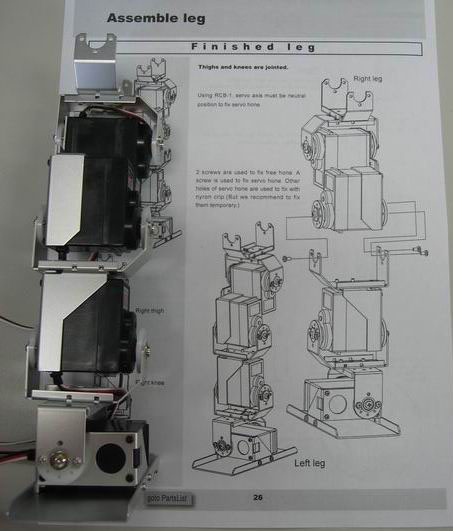
組裝Kondo雙足機器人的左腿和右腿
組裝Kondo雙足機器人的最後一顆馬達,頭部。
頭部為可活動的,因為電池是由此裝卸的。
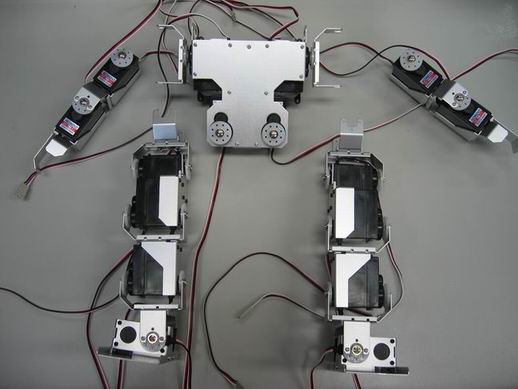
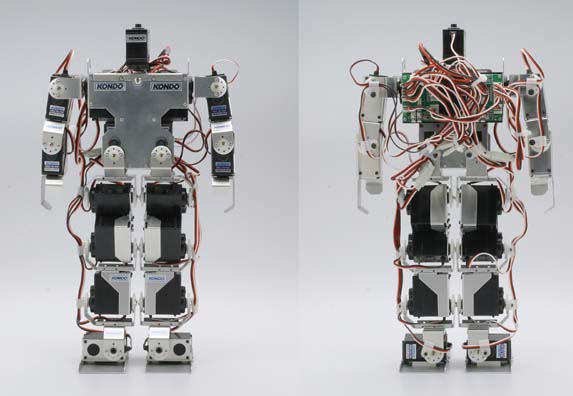
Konod雙足機器人的身體,雙手,和雙腳。
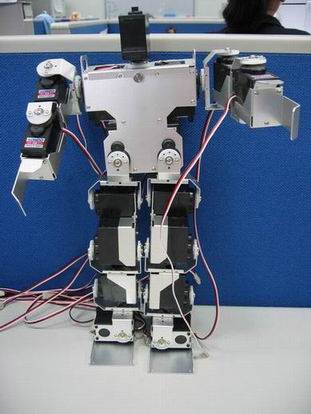
Kondo雙足機器人完成體
不過馬達都還沒設定,所以還不會動。馬達設定完成之後就可以開始好好的作囉。
July 25, 2005
Kondo KHR-1 開箱全記錄
等待已久的的Kondo雙足機器人終於來了!
之前還因為加速度計的關係,在海關停了好一陣子。
終於等到他了!
這幾天也看到了淡江翁老師的團隊,人形機器人的部分也在日本有了好成績。
相關連結:淡江大學機器人揚名日本
希望我們有一天也能為台灣的機器人發展盡一份心力。
好啦!不多說...
今天雖然沒有時間組裝,但是先來看看KHR-1的開箱全記錄吧!

KHR-1的外包裝,超像高級的玩具。
KHR-1 程式光碟 及貼紙 (mm...還真的很像玩具)
KHR-1 程式光碟 及貼紙 (嘿嘿...有很可愛眼睛的Kondo)

終於開箱囉!哇!好多零件和馬達喔...
開始想像他有生命的樣子了^^

RS-232傳輸線,充電器,電池,還有螺絲等小零件

KAG-2 兩軸加速度計,大概只有50元硬幣大小喔
還有一個RS-232的無線傳輸器還沒到
嗯嗯...要趕快把時間空下來,好好的跟他相處一下
看來接下來的幾年都要跟他好好相處囉!耶!
May 04, 2005
Knodo Robot KHR-1
官方網站:
http://www.kondo-robot.com/
KHR-1是日本Kondo公司推出的DIY人形機器人,
它的原型機曾贏得第五屆RoboOne比賽的獎項。
KHR-1有17個自由度,多自由度的原因是要模擬人類。
(頭1,手臂3x2,腳部5x2)
它的控制器RCB-1控制17個伺服馬達,並且可和個人電腦連線,可執行重複動作或自主動作的功能。將機器人各個關節移動到想要的動作位置,就可以透過電腦將這個位置記下,然後機器人會重複這個動作位置,藉此可以教導機器人做某些動作。
尺寸:340*180mm
重量:1.2Kg
動力來源:伺服馬達
處理單元:RCB-1
制動器:伺服馬達
感測器:無
整體自由度:17
只有控制器,而沒有處理器,這是第一步要克服的問題。
初期的研究將以電腦為運算核心,考慮其移動性應該添購無線通訊系統。
Knodo也發表了一款無線的連接PC的組件,應該同時購入,減低系統複雜度和相容性問題。

第二步就是感測器問題
沒有了感測器就永遠沒辦法成為智慧型機器人,只能是遙控機器人。
最終的目標是為他裝上視覺系統,但是初步的目標為加上加速度計。
CI Lab.已經能支援加速度計的電路設計和訊號擷取及分析,
於機器人重心位置架設一三軸加速度計;記錄其移動軌跡,及重心變化。
本來要在關節處加上加速度計來記錄所需之物理資訊,
但是從機器人本身的伺服馬達所讀到的資訊就可以了,就不需要再加裝。
接下來就是重新評估演算法......